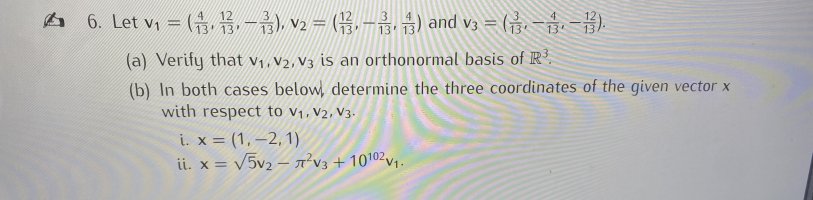
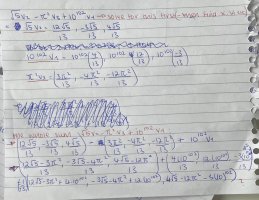
Hello. Could anyone help me with this vector geometry question. Specifically question 6(b)(ii) In the image uploaded.. It seems overly complex to find x=sqrt5v3 - pi^2v3 + 10^102v1 and I feel I’m missing something or shouldn’t be expanding it out maybe ? I have to multiply x by v1,v2,v3 in order to find the coordinates of x with respect to these vectors .. could anyone tell me if I’m doing it the right or wrong way .. my workings just show me trying to solve for x first. Thanks ?
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Vector geometry
- Thread starter RM5152
- Start date
topsquark
Senior Member
- Joined
- Aug 27, 2012
- Messages
- 2,363
I'm not clear on your trouble. The process to get b) is the same as the process to get a). How did you get the answer to a)? Did you use the transformation matrix?Hello. Could anyone help me with this vector geometry question. Specifically question 6(b)(ii) In the image uploaded.. It seems overly complex to find x=sqrt5v3 - pi^2v3 + 10^102v1 and I feel I’m missing something or shouldn’t be expanding it out maybe ? I have to multiply x by v1,v2,v3 in order to find the coordinates of x with respect to these vectors .. could anyone tell me if I’m doing it the right or wrong way .. my workings just show me trying to solve for x first. Thanks ?
-Dan
But as (b) is a sum rather than a vector in the form (x,y,z) do I just multiply that whole long equation of x by v1,v2,v3? It just feels like I’m missing something when I tried to expand out x on its own in my workings here because it is such a long equation …I'm not clear on your trouble. The process to get b) is the same as the process to get a). How did you get the answer to a)? Did you use the transformation matrix?
-Dan
Attachments
topsquark
Senior Member
- Joined
- Aug 27, 2012
- Messages
- 2,363
I think you are doing this the hard way. Let's consider a simpler case:But as (b) is a sum rather than a vector in the form (x,y,z) do I just multiply that whole long equation of x by v1,v2,v3? It just feels like I’m missing something when I tried to expand out x on its own in my workings here because it is such a long equation …
Consider a new basis (1, 3), (2, -1) and a vector (5.9) written in the usual [imath]( \hat{i}, \hat{j} )[/imath] basis. Then in order to change the vector from the old basis to the new we have the following transformation matrix:
[imath]T = \left ( \begin{matrix} 1 & 2 \\ 3 & -1 \end{matrix} \right )[/imath]
(Note the position of the numbers with respect to the new basis vectors.)
Then, in terms of the vector in the "old basis"
[imath]\left ( \begin{matrix} 5 \\ 9 \end{matrix} \right ) = T \left ( \begin{matrix} x_1 \\ x_2 \end{matrix} \right )[/imath]
and we want to find
[imath]\left ( \begin{matrix} x_1 \\ x_2 \end{matrix} \right ) = T^{-1} \left ( \begin{matrix} 5 \\ 9 \end{matrix} \right ) = \left ( \begin{matrix} 1 & 2 \\ 3 & -1 \end{matrix} \right ) ^{-1} \left ( \begin{matrix} 5 \\ 9 \end{matrix} \right ) = \dfrac{1}{7} \left ( \begin{matrix} 23 \\ 6 \end{matrix} \right )[/imath]
(My students always complained that my examples never came out with nice numbers!)
Now, this might seem a little backward as we have to invert the matrix we get but that's because we have to write the transformation matrix T in terms of the old basis.
Once you have the transformation matrix T (or rather, it's inverse) you are set to go with any vector transformation.
See here for a good video on this.
-Dan
Note: The link gets you to the video but it's starting halfway through. I don't know why.