mpzmusicman
New member
- Joined
- May 15, 2018
- Messages
- 2
Hello All,
I'm not sure this is the right place to post this question, but I'm hoping it is!
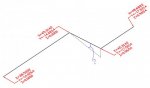
I've received an assignment to convert a series of XYZ coordinates to relative LRA (or YBC - depending on your industry) Length Rotation Angle values. The application of this problem is to be used for a recently procured bending machine, which takes a long pipe, and bends it according to these values. The XYZ coordinates are coming from a list of XYZ values given to me from a CAD application.
Given the following XYZ points (Px) coordinates:
P1: (38.5202, -14.0264, 0.0)
P2: (45.3142, -14.0264, 0)
P3: (45.3142, -17.5214, 0.9654)
P4: (48.6822, -17.5214, 0.9654)
I've figured out the length and angle values, as those are easy to arrive to using the Cartesian distance formula, and the law of cosines for the deltas of the related points.
However - i"m really struggling (completely clueless) on how to get the rotation value.
This value must be equal to the angle of rotation (in degrees) necessary for each line.
I hope I described the problem well enough. I've tried to attach a screenshot of the rotation angle I'm trying to get. Any help is appreciated!!!
I'm not sure this is the right place to post this question, but I'm hoping it is!
I've received an assignment to convert a series of XYZ coordinates to relative LRA (or YBC - depending on your industry) Length Rotation Angle values. The application of this problem is to be used for a recently procured bending machine, which takes a long pipe, and bends it according to these values. The XYZ coordinates are coming from a list of XYZ values given to me from a CAD application.
Given the following XYZ points (Px) coordinates:
P1: (38.5202, -14.0264, 0.0)
P2: (45.3142, -14.0264, 0)
P3: (45.3142, -17.5214, 0.9654)
P4: (48.6822, -17.5214, 0.9654)
I've figured out the length and angle values, as those are easy to arrive to using the Cartesian distance formula, and the law of cosines for the deltas of the related points.
However - i"m really struggling (completely clueless) on how to get the rotation value.
This value must be equal to the angle of rotation (in degrees) necessary for each line.
I hope I described the problem well enough. I've tried to attach a screenshot of the rotation angle I'm trying to get. Any help is appreciated!!!